I am currently working at Boston Dynamics as an Advanced Robotics Engineer on the Atlas Project.
From 2012-2018, I was PhD student at the University of Southern California (USC) studying Computer Science. At USC I was researcher in the Computational Learning and Motor Control (CLMC) Lab where I was advised by Stefan Schaal and Ludovic Righetti. My research has focused on optimal control methods for torque controlled robots.
Over the years, I have worked with a number of different robots including humanoids, quadrupeds, and mobile robots. Before USC, I recieved a B.S. and M.S. degree in Mechanical engineering and worked in the Drexel Autonomous Systems Lab (DASL). During this time, I had the opportunity to conduct an internship at HUBO Lab at KAIST in South Korea where I worked on developing both CAD and an online assembly / disassembly manual for the humanoid robot HUBO 2. At USC, I have worked with two hydraulically actuated Sarcos humanoids (Hermes and Athena) and have conducted research on optimization based control for balancing and walking. I also worked at Disney Imagineering where I was involved with developing control algorithms for a quadrupedal robot.
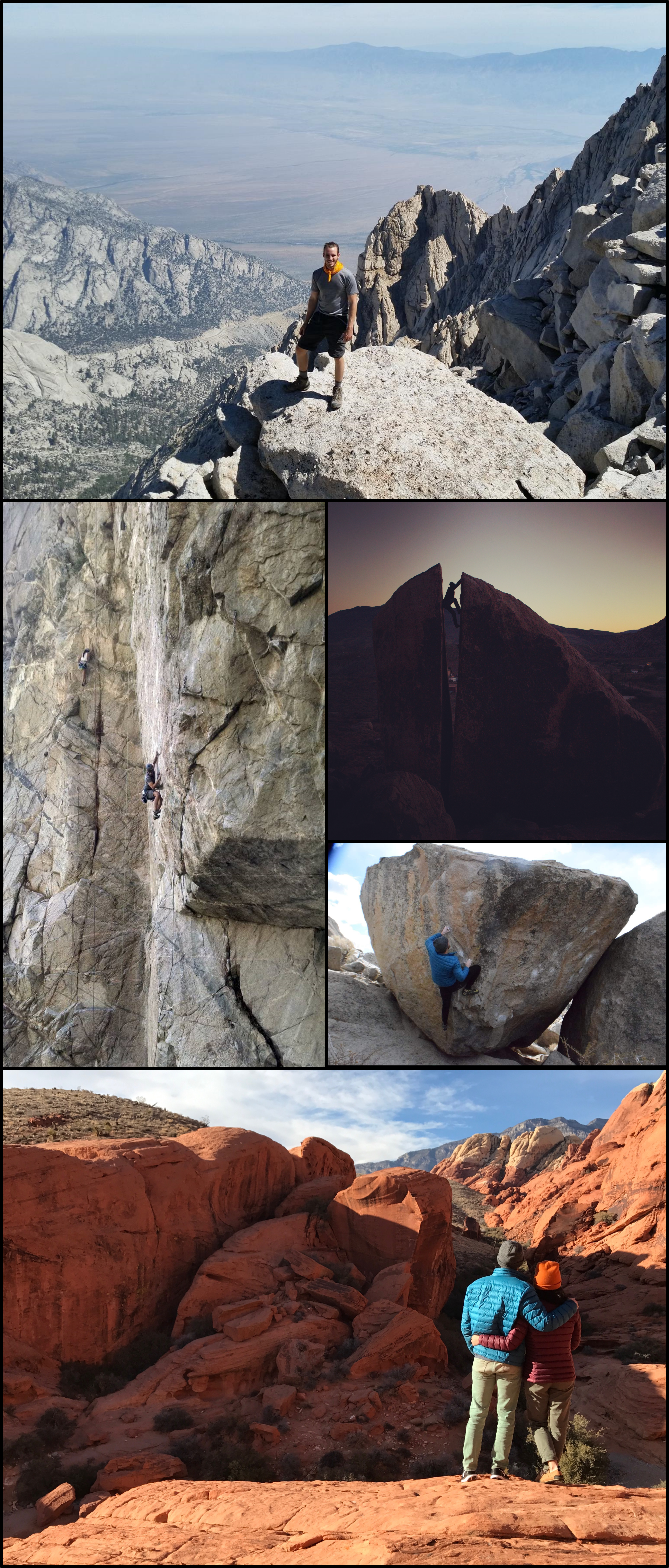
When I’m not working on research, I try to spend most of my time outdoors either hiking or rock climbing. Recently, I have been spending some of my time designing and machining different projects on my desktop CNC machine (Shapeoko 2).
Some of the robots I've worked with over the years.
Publications
An MPC Walking Framework With External Contact Forces
2018 IEEE International Conference on Robotics and Automation (ICRA)
To allow for more generalized walking experiments, I developed a modular state-machine walking controller based on preview control. Inputs are sent over a joystick (x-box controller) using ROS and allow one to set desired walking velocities, turning, add external forces, and change the walking parameters online. This setup has become extremely helpful for debugging new walking controllers by allowing the user to quickly try new parameters interactively.
Motion Capture Based Calibration and System ID
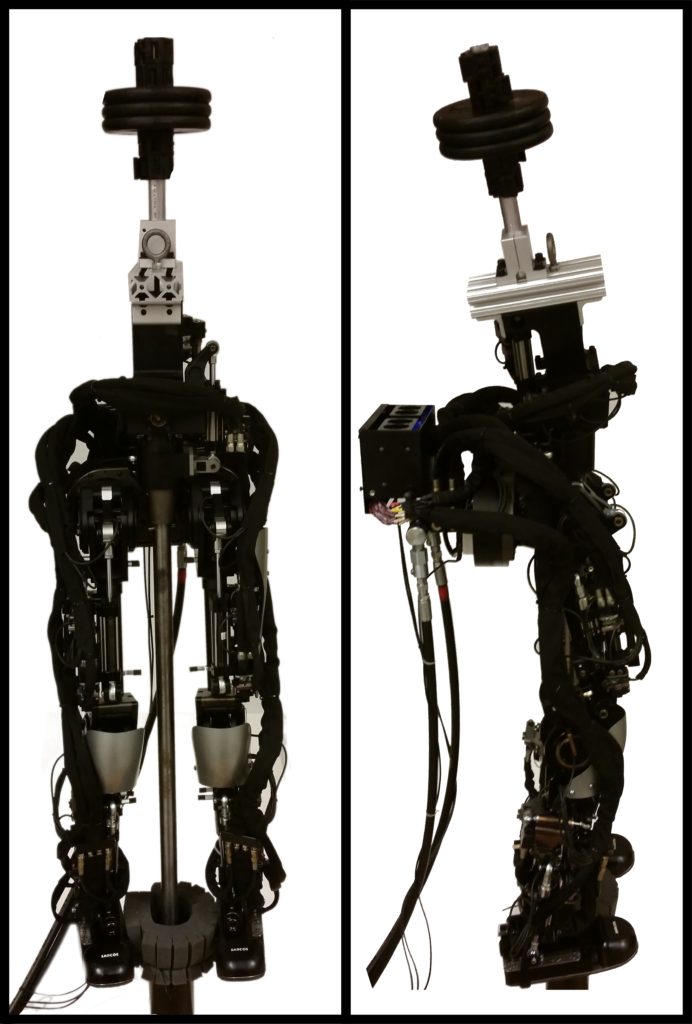
Because most of my work has been based in model based control, having a good model and knowledge of the current state is extremely important. On the left, is the Sarcos humanoid with custom Vicon markers that I designed and had 3D printed. Using these markers we can get “ground truth” on joint angles and link locations. This has been important to verify joint calibrations, base state estimation. Additionally, I am also involved in a project to try and estimate inertial parameters base on the paper “Observability in Inertial Parameter Identification” by Patrick Wensing et. al. A video of the motions used to collect data for this work is shown.
Low-level Torque Control Firmware Update
The low-level torque control loop can have a great impact on the overall stability of higher-level control loops. By modifying the firmware provided by Sarcos, we were able to increase the torque control frequency from 1000 Hz to 5000Hz. The increased bandwidth and new filtering scheme allowed us to remove the feed-forward velocity compensation previously used and use lower feedback gains. The net result was a low-level toque control policy that tracked torque signals as well as before with less noise. This increased the stability of higher-level control loops as shown in the video on the left. This firmware update has been applied to all of the Sarcos humanoids at USC and MPI.
Modular Upperbody Mass Fixture
Using the upper body can be a very effective way to balance and regulate momentum. To allow for experiments that involve a torso mass, I built a simple modular weight / height fixture that mounts to the top of lowerbody of the Sarcos humanoid. In the video below, I am using the upperbody mass to create disturbances while the lower body balances using a LQR controller based on the full robot dynamics. The details of this balance controller are shown in “Full dynamics LQR control of a humanoid robot: An experimental study on balancing and squatting” and “Balancing and Walking Using Full Dynamics LQR Control With Contact Constraints.”
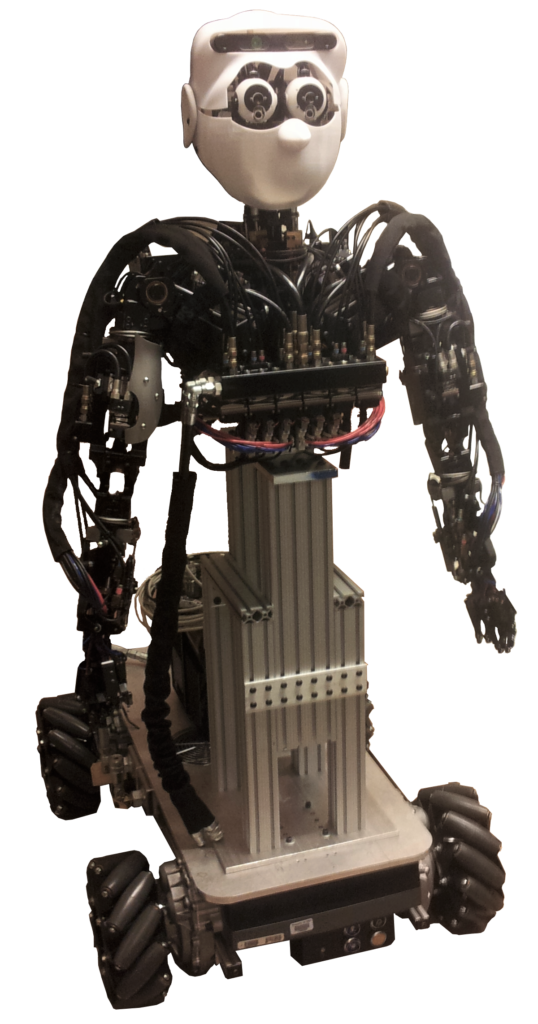
Modular Height Mobile Humanoid Platform
Humanoid robotics is combination of many fields of robotics, including: locomotion, manipulation, vision, path-planning, and more. In order to decouple the problem of locomotion from the others listed, I developed a modular height mounting fixture to attach the Sarcos humanoid upperbody to a custom made holonomic driven on Mecanum wheels. Because the platform can move in any direction, researches can treat the problem of locomotion as “solved” and work on other research topics in parallel.